La investigación se basa en dos tipos de células de la rana de uñas africana: células contráctiles del corazón (con capacidad de moverse) y células pasivas de la piel (no se mueven).
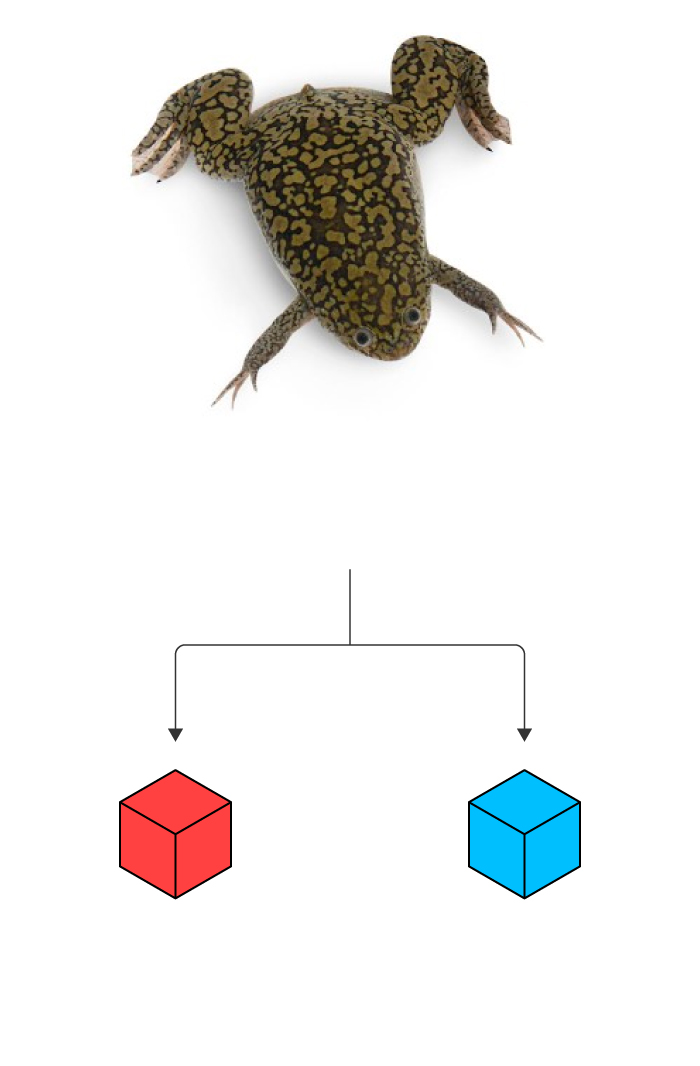
Rana de uñas africana
‘Xenopus laevis’
Durante meses, los científicos han utilizado el superordenador Deep Green de la
Universidad de Vermont para simular miles de agregados de diferentes formas, con unos pocos cientos de células, e
intentar predecir su comportamiento.
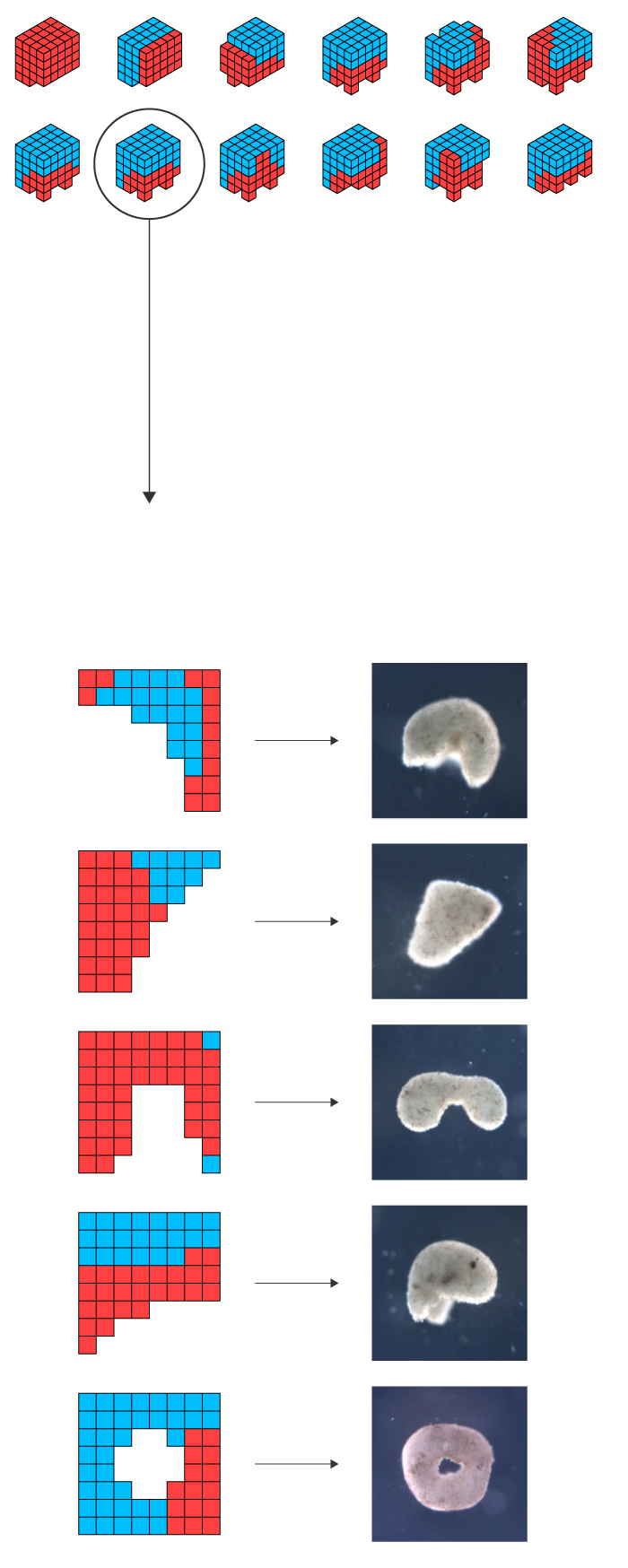
Partiendo de miles de configuraciones aleatorias de esas células, el algoritmo escoge los diseños más adecuados para una determinada tarea.
Estructura
creada en el
superordenador.
Organismo creado en
laboratorio con células
reales de rana.
Los científicos intentaban diseñar, por ejemplo, agregados de células de moverse en una
dirección determinada. Este es el resultado:
Estructura generada en el superordenador
Organismo real
Otros comportamientos
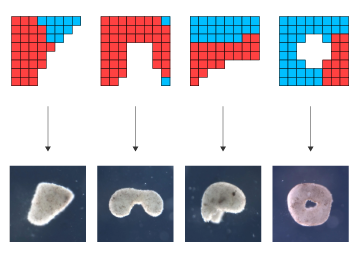
Los científicos reconfiguraron sus biobots para mostrar cuatro tipos de comportamientos:
Manipulación de objetos. Los biobots se dirigen espontáneamente a las partículas de su entorno y las empujan. Los científicos creen que esta función se puede perfeccionar para dirigirse a partículas concretas.
Transporte de objetos. Los investigadores han creado en el laboratorio agregados con un agujero en medio. Las simulaciones en el superordenador sugieren que este agujero se podría utilizar como un bolsillo para transportar objetos.
Comportamiento colectivo. Las simulaciones en el superordenador sugieren que varios biobots se moverían de forma espontánea en círculos, empujando las partículas exteriores a una ubicación central.
Resistentes
Los investigadores han intentado romper los biobots y han observado que se reconstruyen solos.
Escalabilidad
Los científicos han hecho simulaciones de más de 270.000 células.
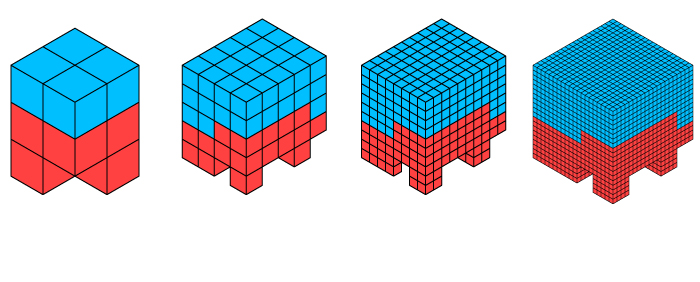
x1
x2
x4
x8